申请理由:得知获得M2无望,唏嘘嗟叹之余,心下一横购买了cubieboard_v2,一共有67根GPIO,如果我申请到了M2,LVDS那里没有杜邦线的插口,反而还不太好利用。cb_2的特点就是pin多,但是没有ccd,没有wifi,没有mic。。。,虽然有红外。。。
综上所述,正好需要一个这样的附加功能全面的小板。可利用手机cam与该板ccd构成双目系统以判断远近。
预期成果:在cb2上编译opencv,利用bpi-d1获取图像,与android手机cam传来的图像进行比较和处理以感知目标物体。
最后,多写一段,希望能够增加得到d1的概率
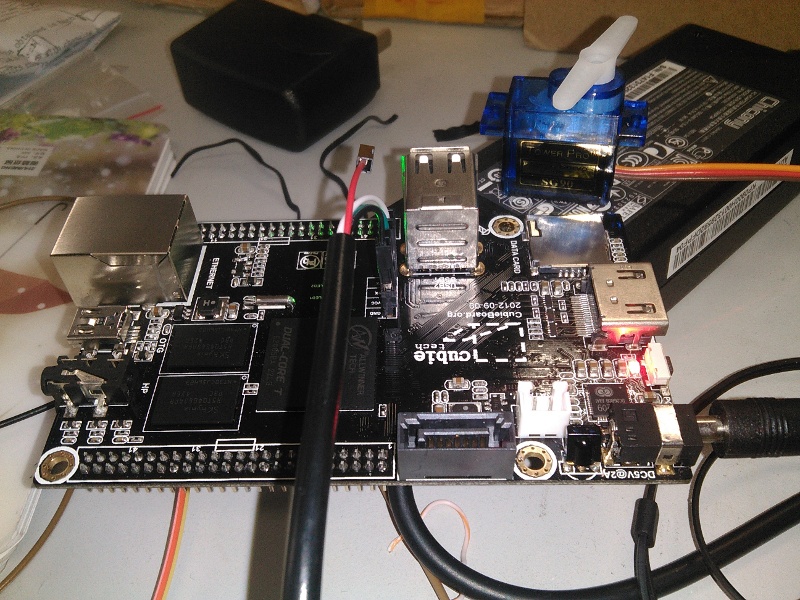
利用aoa协议与android通信,输出pwm信号驱动sg90,均早已在笔记本上实现。这两天也成功地移植到了cb上,希望能够得到d1,为自己节省点购买费用。附cubieboard2驱动正在驱动舵机的截图一张,鼓励一下自己,也祝论坛越办越好。
/*
//放弃申请BPi-M2。
申请板卡:BPi-M2
职业:研究生
编程语言:C/java,
使用过的板卡:Arduino UNO/USB Host shield、STM32具体哪个型号忘了,上arm实验课时用的。
是否发过教程一类的帖子:
发过软件类的帖子,慢慢发现自己越来越肤浅,就再也不敢发了。
到手后怎样使用:
短期:机械腿制作,机械手建模,视觉反馈,通过spi连arduino usb host shield再与手机互联。
机械腿:手头正好有三个舵机,泡沫、硬纸板、线槽已全部准备妥当,万事具备只欠开发板。
机械手:预想完成端水杯的动作,初步决定至少需要5个自由度。至少五个舵机啊,这学期穷,只能干干建模的工作。(已自学高等机构,在获取机械腿的相关参数后应该可以比较准确的模拟机械手的动作)
视觉反馈:向linaro中加入opencv,用于处理图像,以此找到水杯位置。
手机互联:图像的获取由手机摄像头完成,机械手位姿由手机加速度计测量,我会写一个app通过AOA2.0与 usb host shield互联通信。
长期:希望能在毕业之前,做一个去二楼打水的机器人。机械方面,如何能让机器人完美的上楼梯?六条腿估计不够,所以应该会采用cubieboard做腿部的底盘(96pin啊,很有吸引力!),而手部则由banana控制。
硬件结构:(banana|host shield|android)+(cubieboard),两块板通过串口通信。
*/