申请板卡:BPi-M2.
职业:公务员(分管科教)
编程语言: C、C++、vhdl、hdevelop
使用过的板卡:ardupilot、STM32f3discovery,、banana pi、altera ep1c6 fpga
是否发过教程一类的帖子:
还没有在本社区发过教程贴,相信未来在学习过程中会写下自己的学习经验。
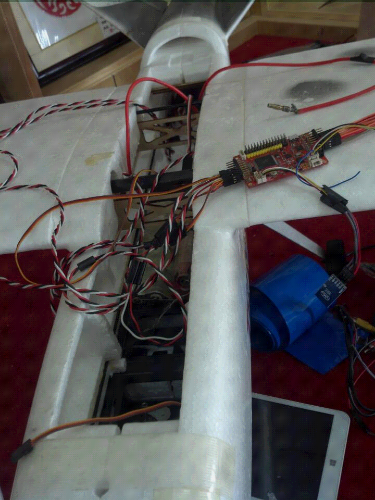
到手后怎样使用(方向):致力于将ardupilot和paparazzi等开源飞控系统以及opencv等机器视觉和学习系统移植集成到banana m2上。制作低成本的智能导航系统,主要面相无人航空市场,目前已经在banana pi 上完成了 实时内核构建,测试效果非常好。最大延时在64微妙左右,已经完成了ardupilot大部分代码的移植,可实现固定翼、多旋翼以及无人车和无人穿的导航控制。接下来是将opencv. 集成到系统中,实现景象匹配,地形比对和其他人工智能算法,需要多核心处理器的支持,特申请banana m2一台。我的代码放在github上 用户名是cudnn
正在做基于linux-uav-mv

已经完成了 preempt patch
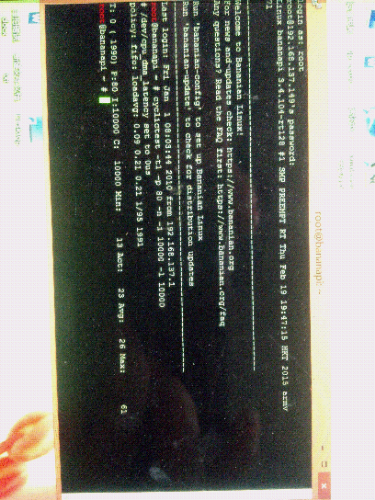
这是测
试成绩
这是spi的部分代码,陀螺仪加速度大部分都通过spi传输数据
#if CONFIG_HAL_BOARD_SUBTYPE == HAL_BOARD_SUBTYPE_LINUX_PXF || CONFIG_HAL_BOARD_SUBTYPE == HAL_BOARD_SUBTYPE_LINUX_ERLE
LinuxSPIDeviceDriver LinuxSPIDeviceManager::_device[LINUX_SPI_DEVICE_NUM_DEVICES] = {
// different SPI tables per board subtype
LinuxSPIDeviceDriver(1, 0, AP_HAL::SPIDevice_LSM9DS0_AM, SPI_MODE_3, 8, BBB_P9_17, 10MHZ,10MHZ),
LinuxSPIDeviceDriver(1, 0, AP_HAL::SPIDevice_LSM9DS0_G, SPI_MODE_3, 8, BBB_P8_9, 10MHZ,10MHZ),
LinuxSPIDeviceDriver(2, 0, AP_HAL::SPIDevice_MS5611, SPI_MODE_3, 8, BBB_P9_42, 10MHZ,10MHZ),
LinuxSPIDeviceDriver(2, 0, AP_HAL::SPIDevice_MPU6000, SPI_MODE_3, 8, BBB_P9_28, 5001000, 20MHZ),
/* MPU9250 is restricted to 1MHz for non-data and interrupt registers /
LinuxSPIDeviceDriver(2, 0, AP_HAL::SPIDevice_MPU9250, SPI_MODE_3, 8, BBB_P9_23, 1MHZ, 20MHZ),
LinuxSPIDeviceDriver(2, 0, AP_HAL::SPIDevice_Dataflash, SPI_MODE_3, 8, BBB_P8_12, 6MHZ, 6MHZ),
};
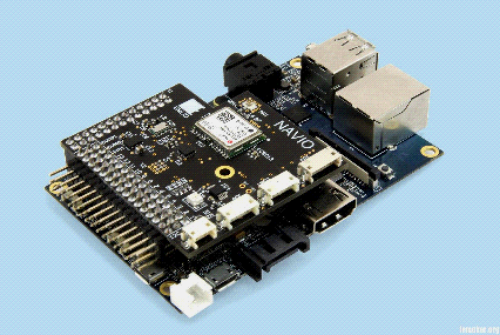
#elif CONFIG_HAL_BOARD_SUBTYPE == HAL_BOARD_SUBTYPE_LINUX_NAVIO
LinuxSPIDeviceDriver LinuxSPIDeviceManager::_device[LINUX_SPI_DEVICE_NUM_DEVICES] = {
/ MPU9250 is restricted to 1MHz for non-data and interrupt registers /
LinuxSPIDeviceDriver(0, 1, AP_HAL::SPIDevice_MPU9250, SPI_MODE_0, 8, SPI_CS_KERNEL, 1MHZ, 16MHZ),
LinuxSPIDeviceDriver(0, 0, AP_HAL::SPIDevice_Ublox, SPI_MODE_0, 8, SPI_CS_KERNEL, 1MHZ, 4MHZ),
};
#elif CONFIG_HAL_BOARD_SUBTYPE == HAL_BOARD_SUBTYPE_LINUX_BBBMINI
LinuxSPIDeviceDriver LinuxSPIDeviceManager::_device[LINUX_SPI_DEVICE_NUM_DEVICES] = {
LinuxSPIDeviceDriver(2, 0, AP_HAL::SPIDevice_MS5611, SPI_MODE_3, 8, BBB_P9_42, 10MHZ,10MHZ),
/ MPU9250 is restricted to 1MHz for non-data and interrupt registers /
LinuxSPIDeviceDriver(2, 0, AP_HAL::SPIDevice_MPU9250, SPI_MODE_3, 8, BBB_P9_23, 1MHZ, 20*MHZ),
};
#else
// empty device table
LinuxSPIDeviceDriver LinuxSPIDeviceManager::_device[0];
#endif
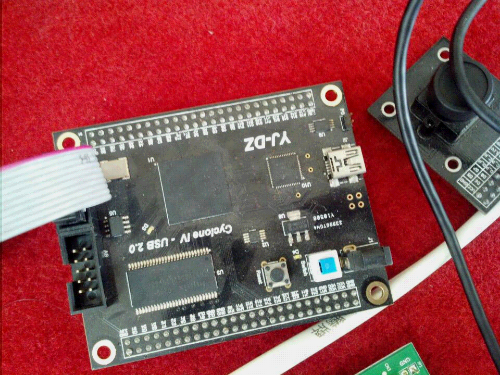
用fpga做的双目立体视觉系统
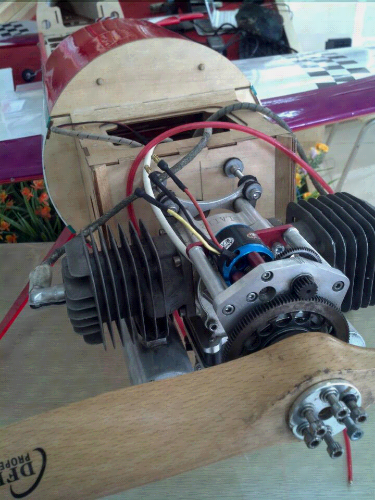
飞翼气动布局的中型无人机,搭载了基于halcon的光电系统,飞机上装了一台双核酷睿计算机,采用大恒的图像采集卡,vt120 一台12马力的两冲发动机


高端!问俩问题:1、fpga不是频率有限吗,为什么要拿他做视觉系统,仅仅是为了验证设计吗?2、为什么现在飞机都喜欢做成这种b2形状的?这种形状的机翼不是缺点很多吗?飞又飞不快,动作不灵活。
fpga 的并行运算能力很强,甚至可以做超级计算机,但是设计难度很大。我用fpga主要做接口,把图像实时传送到计算机,并实现一定的预处理。
飞翼气动布局只需要两个舵机 成本低 制作简单
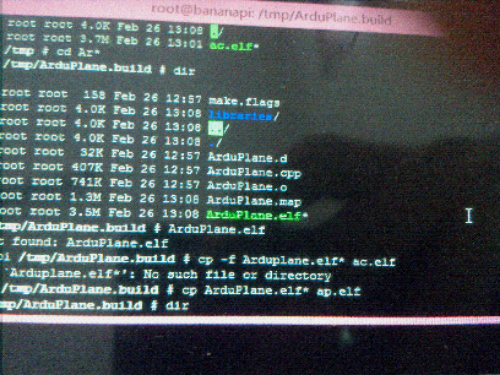
飞控代码编译,通过.
假如想做一个泡沫的这种飞翼的飞机,能否推荐一本入门的书?外形尺寸如何设计?副翼转多少,飞机能出现怎样的轨迹变化?等等,要解答这些问题,该看什么书?
牛逼!涨姿势了!
1.板子到手前争取找到gpio和i2c spi uart的说明文档。 2.在没有内核代码的情况下,打算用sunxi进行移植,得到raspbian内核。 3.给内核打rtpreetmpt补丁,编译实时内核。 4.用circletest进行测试,看中断延迟情况是否符合要求。 5.移植ardupilot 飞控,主要完成gpio驱动,spi陀螺.加速度.磁场.气压传感器、uart 接楼数穿电台和gps的驱动移植。 6.进行bus test 得到各传感器的who am i信息。 7.通过i2c连接 mega2560,输出16路pwm 用于伺服控制,输入8路rc data,输入8路adc,使用avr的eeprom. 8.进行遥控数据测试。 9.姿态伺服控制测试。 10.进行四轴铰链平衡测试。 11.首飞banana m2四轴。 12.测试固定翼代码。 13.固定翼首飞,测试常规气动布局控制能力。 14.安装opencv,完成机器视觉功能开发。 15.进行目标锁定实验。
用一个aaa的软件 说明很详细,我是参考法国的蟋蟀载人小飞机的参数设计的
好的,谢谢。