BPI-Pico-S3 与 Raspberry Pi Pico 板尺寸相同,搭载ESP32S3芯片,8M flash,4层PCB,电镀半孔工艺,陶瓷天线,支持 2.4 GHz Wi-Fi 和 Bluetooth® LE 双模无线通信,是一款专为物联网开发和Maker DIY设计的开发板。
出厂内置 tinyUF2 + CircuitPython,推荐使用Mu编辑器上手CircuitPython开发。
BiliBili视频
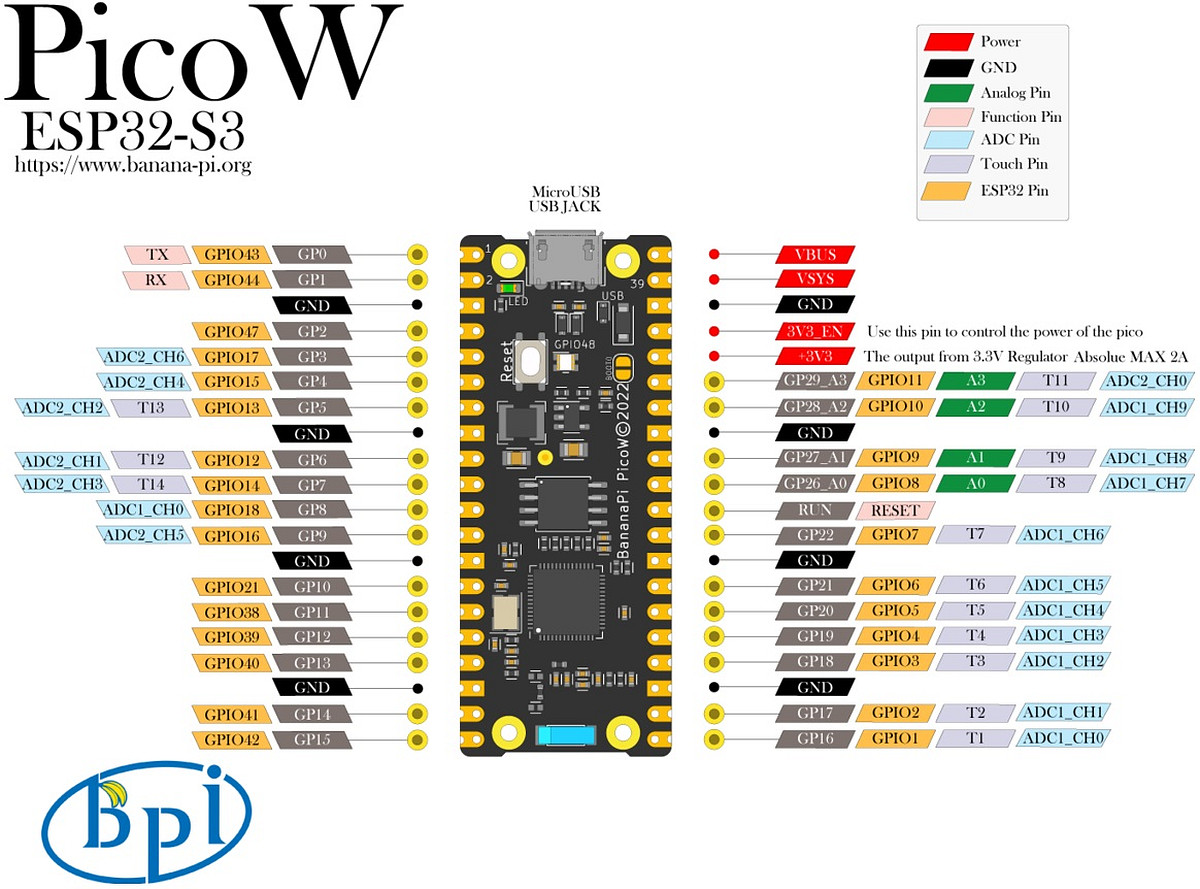
硬件接口示意图
OLED实时动画显示双轴摇杆位置
基于这两章:
BPI-PicoW-S3 下载安装CircuitPython库,驱动ssd1306 oled屏幕[CircuitPython]
BPI-PicoW-S3 使用双轴摇杆[CircuitPython]
可设计一个使OLED实时动画显示双轴摇杆位置的程序。
接线参考
| 双轴摇杆 | BPI-PicoW-S3 |
|---|---|
| GND | GND |
| +5V | 3V3 |
| VRx | GP27_A1 |
| VRy | GP26_A0 |
| ssd1306 | BPI-PicoW-S3 |
|---|---|
| GND | GND |
| VCC | 3V3 |
| SCL | GP0 |
| SDA | GP1 |
import time
import board
import busio
import analogio
import adafruit_ssd1306
def get_zero(times =500, sleep = 0.01):
x_total = 0
y_total = 0
for i in range (times):
x_axis = x_axis_pin.value
y_axis = y_axis_pin.value
x_total += x_axis
y_total += y_axis
time.sleep(sleep)
x_zero = x_total // times
y_zero = y_total // times
return (x_zero,y_zero)
def get_extremum(times =500, sleep = 0.01):
x_list = []
y_list = []
for i in range (times):
x_axis = x_axis_pin.value
y_axis = y_axis_pin.value
x_list.append(x_axis)
y_list.append(y_axis)
time.sleep(sleep)
x_extremum = (min(x_list),max(x_list))
y_extremum = (min(y_list),max(y_list))
return (x_extremum,y_extremum)
def get_spacing(level = 16 , zero =(32767,32767) ,x_extremum = (0,65535),y_extremum = (0,65535)):
x_temp_1 = (zero[0] - x_extremum[0]) // level
x_temp_2 = (x_extremum[1] - zero[0] ) // level
y_temp_1 = (zero[1] - y_extremum[0]) // level
y_temp_2 = (y_extremum[1] - zero[1] ) // level
x_spacing = (x_temp_1,x_temp_2)
y_spacing = (y_temp_1,y_temp_2)
return (x_spacing,y_spacing)
def get_coordinates(zero = (32767,32767), x_spacing = (2048,2048),y_spacing = (2048,2048)):
x_value = x_axis_pin.value - zero[0]
y_value = y_axis_pin.value - zero[1]
if x_value >= 0:
x_axis = x_value // x_spacing[1]
else:
x_axis = - ((-x_value) // x_spacing[0])
if y_value >= 0:
y_axis = y_value // y_spacing[1]
else:
y_axis = - ((-y_value) // y_spacing[0])
return (x_axis,y_axis)
# i2c init
i2c = busio.I2C(board.GP0, board.GP1)
display = adafruit_ssd1306.SSD1306_I2C(128, 64, i2c, addr=0x3C)
# Uniformly set the color and background color of displayed characters or graphics.
# Monochrome OLEDs only need to set one and then negate the other.
display_color = 0
bg_color = not display_color
# Fill background color.
display.fill(bg_color)
display.show()
# Set 2-axis rocker pin.
x_axis_pin = analogio.AnalogIn(board.A0)
y_axis_pin = analogio.AnalogIn(board.A1)
# Calibrate the zero point.
# Take the xy-axis reading when the dual-axis joystick is at rest and set it to zero point.
display.text('Zero adjustment', 0, 20, display_color, font_name='font5x8.bin', size=1)
display.text('Do not touch', 0, 28, display_color, font_name='font5x8.bin', size=1)
display.show()
zero = get_zero(times =200, sleep = 0.01)
display.text('Do not touch', 0, 28, bg_color, font_name='font5x8.bin', size=1)
str_zero = "x={},y={}".format(zero[0],zero[1])
display.text(str_zero, 0, 28, display_color, font_name='font5x8.bin', size=1)
display.show()
print(str_zero)
time.sleep(2)
# Different hardware measures different extreme values.
display.fill(bg_color)
display.text('Extremum adjustment', 0, 20, display_color, font_name='font5x8.bin', size=1)
display.text('Rotary rocker', 0, 28, display_color, font_name='font5x8.bin', size=1)
display.show()
(x_extremum,y_extremum) = get_extremum(times = 400, sleep = 0.01)
display.text('Extremum adjustment', 0, 20, bg_color, font_name='font5x8.bin', size=1)
display.text('Rotary rocker', 0, 28, bg_color, font_name='font5x8.bin', size=1)
str_x_extremum = "x_min={},x_max={}".format(x_extremum[0],x_extremum[1])
str_y_extremum = "y_min={},y_max={}".format(y_extremum[0],y_extremum[1])
display.text(str_x_extremum, 0, 20, display_color, font_name='font5x8.bin', size=1)
display.text(str_y_extremum, 0, 28, display_color, font_name='font5x8.bin', size=1)
print((str_x_extremum, str_y_extremum))
display.show()
time.sleep(2)
# Setting the scale spacing can eliminate unnecessary jitter.
(x_spacing,y_spacing) = get_spacing(level = 32 , zero = zero, x_extremum = x_extremum,y_extremum = y_extremum)
print((x_spacing, y_spacing))
display.fill(bg_color)
display.text('x=', 70, 16, display_color, font_name='font5x8.bin', size=2)
display.text('y=', 70, 32, display_color, font_name='font5x8.bin', size=2)
(x_axis,y_axis) = (0,0)
(x_axis_1,y_axis_1) = (1,1)
(x_axis_2,y_axis_2) = (0,0)
display.show()
while True:
# Get the coordinate value in a loop.
(x_axis,y_axis) = get_coordinates(zero = zero, x_spacing = x_spacing, y_spacing = y_spacing)
# Only refresh the display when the coordinates change.
if (x_axis,y_axis) == (x_axis_1,y_axis_1):
pass
else:
# Using background color inversion for identical pixels,
# pixels can be refreshed with minimal performance cost.
display.fill_rect(x_axis_2-3, y_axis_2-3, 6, 6, bg_color)
display.text(str(x_axis_1), 90, 16, bg_color, font_name='font5x8.bin', size=2)
display.text(str(y_axis_1), 90, 32, bg_color, font_name='font5x8.bin', size=2)
(x_axis_1,y_axis_1) = (x_axis,y_axis)
(x_axis_2,y_axis_2) = (x_axis+32, -y_axis+32)
display.fill_rect(x_axis_2-3, y_axis_2-3, 6, 6, display_color)
display.text(str(x_axis_1), 90, 16, display_color, font_name='font5x8.bin', size=2)
display.text(str(y_axis_1), 90, 32, display_color, font_name='font5x8.bin', size=2)
display.show()
BPI-PicoW-S3 + CircuitPython 教程聚合链接
购买BPI-PicoW-S3:
-
OEM&OEM 定制服务: [email protected]