这个论坛版块是关于D1的,但是我想了好久也就只能发到这里,毕竟D1可以实现类似的功能。
这是以前做过的一个小车的教程,小车的功能是:
1、蓝牙通讯模式:可以用安卓手机或者电脑进行运动控制和小车的电池电量等数据的接收。
2、wifi通讯模式:可以用安卓手机或者电脑查看小车的摄像头图像以及对小车的动作控制以及接收小车上传的电池电量等数据。
3、wifi通讯模式:可以远程实现上述功能。
思路:
1、摄像头使用免驱摄像头,降低软件难度。
2、无线传输模块使用蓝牙模块和703N路由器。蓝牙模块不用说了,就是串口交叉通讯。703N路由器刷入openwrt系统,完成视频数据回传和控制等信号的转发。
3、动作控制部分用51单片机实现,相当于串口的IO扩展。IO与串口之间数据转换。包括动作控制命令和数据回传。
步骤:
1、硬件部分:
列表
703N无线路由器、Microusb线、免驱usb摄像头、蓝牙数传模块从机、STC11F32XE单片机、最小单片机开发板(11.0592晶振)、L298N电机驱动电路(带光耦隔离的最好)、TT电机四只(或者两只加一个万向轮)、电池(6V-15V,电池建议用11.1V的锂电池),充电器,LM2596 DCDC稳压模块、手机、电脑。

2、数传模块
将703N路由器更换ROM为4M-16M。原机2M可以保留为双系统。然后刷入openwrt系统(用编程器刷入最好),然后导入Mjpeg和串口转发程序,设置自启动,串口在开机后初始化为9600通讯。



3、下位机
要哪个STC11F32XE 单片机+11.0592M的晶振组成单片机最小系统,刷入下位机对应程序。
4、硬件组装
将车架、TT电机。万向轮、。L298N驱动电路等安装完毕,连接线路,注意各个模块要共地链接。单片机串口和IO电平是5V,路由器串口电平3.3V,可以串接0-10欧姆电阻。实际使用时发现可以不串接电阻。L298N带光耦隔离较好,因为电动机在切换正反转的时候通过L298N会将灌电流窜入单片机,可能会导致单片机重启。电路部分带上图。。。

5、控制端,手机或者电脑安装控制程序。
接通电源,就可以玩咯。
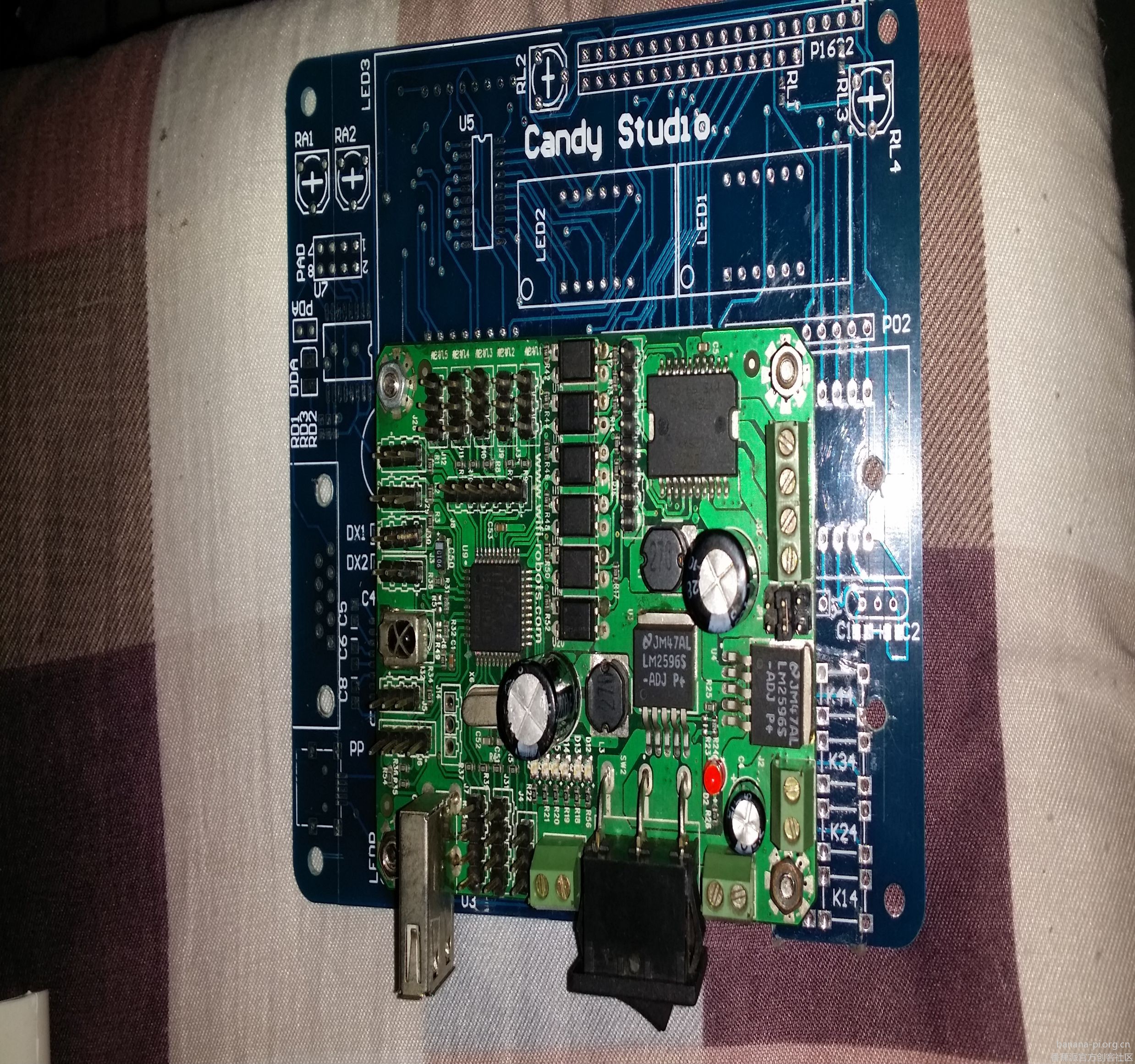
PS:附带几张照片。
1:小车专用单片机驱动板,带L298N驱动,带舵机接口,红外接口,超声波雷达接口,大灯接口串口以及USB供电接口,两路dcdc转换,一路为5V供给单片机和舵机及其他模块,另一路供给L298N和电机。
2:我做的履带小车,怎么感觉这么丑,和论坛的履带底盘比起来太丑了



3:蓝牙模块,请无视外壳。。。

4:我的usb红外启动切换摄像头。

5:机械手部分

6:前灯+红外距离传感器+转向灯+黑白线检测、、

