我将教大家用ROS,arduino,bananapi_M1搭建一个轮式机器人(小车一枚)!!!网页可以控制小车的移动,可以传输图像.后续会有自主导航能力!!期待的同志们准备好arduino,bananapi,电机驱动,智能小车底盘!!!
欢迎大家来交流!!!我是北京一号!!!
//2015/5/20 21:34
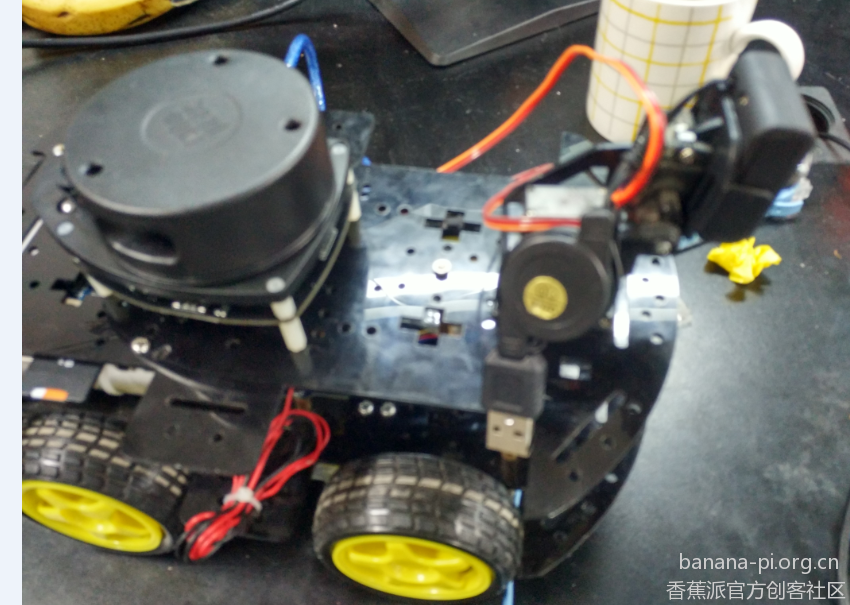
基本成型;千元以下(没有激光雷达!!)的ROS机器人来喽! !

2015/5/21 8:23今天我给大家分享一下我对ROS的理解。
ROS :Robot Operating System 是现在最流行的开源机器人操作系统。创客资源那里有个wiki链接大家可以参考,
ROS 已经在很多领域发挥作用,应用场合越来越多,越来越多的机器人软件资源开始向ROS集中,ROS集合了众人
智慧。ROS集合了opencv,自主导航,等等好多好玩的资源。ROS提供了一个很好的平台供大家进行机器人软件的
交流与融合,从此做机器人不用从零开始!好多package可以用!!让你能快速搭建出你想要的机器人!不仅仅是
专业人士的最爱,这是创客,DIY爱好者的福音!
我的设计思路是bananpi+arduino+ROS完成网页控制、视频监控、调试等功能(能力有限先做这些)。bannapi主要
用来跑系统,arduino负责电机的底层驱动程序,网页充当遥控器!!
以上纯属个人观点看法!若有雷同纯属巧合!!转载请注明出处!!!ThankYou!
2015/5/26 10:08
今天教大家安装ROS系统,这部分内容在wiki上我只是搬运工+翻译。
1. 安装lubuntu系统
ROS系统支持许多操作系统,喜欢的同志可以去研究下一,ubuntu是ROS 支持最好的系统,因此这里选用的是ubuntu系统作为ROS的运行环境,
这样免去了不少麻烦,不需要从源码编译装。(ROS 的安装有两种方式:a. apt 指令安装 b. 下载源码编译安装),从官网下载lubuntu系统后将
lubuntu14.04烧写进SD卡。
**2. **安装ROS系统选择的ROS版本是indigo,现在最新的是Jade。indigo版本是个长久支持的版本。大家可以放心的用,jade为新版本,可能有bug或者有的包不支持arm。
a.设置repositories
参考链接https://help.ubuntu.com/community/Repositories/Ubuntu
b.设置语言环境,编译工具啥的
[list]
*]sudo update-locale LANG=C LANGUAGE=C LC_ALL=C LC_MESSAGES=POSIX
[/list]
c.设置源列表[list]
*]sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu trusty main” > /etc/apt/sources.list.d/ros-latest.list’
[/list]
d.设置证书
[list]
*]wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -O - | sudo apt-key add -
[/list]
e.update一下,运行
[list]
*]sudo apt-get install ros-indigo-ros-base
[/list]开始安装。我们安装的是基础版,本次制作中足够用了。
3.测试打开终端,运行roscore,如果能够启动起来证明ROS 安装成功了。
//2015/5/30 16:40
今天呢!随便写写,给大家讲解一点ROS的知识,ROS机器人系统虽然叫系统但是跟我们用的linux、windows是不一个概念的,
他是一个次级的操作系统,他依赖于其他操作系统,他更像一种代码规范,方便大家把与机器人有关的代码规范进行整合,他能
能够帮开发者以最快的速度搭建一个机器人平台,开发者可以更加专注研究自己关心那的部分。
ROS里面有几个比较重要的概念:节点(node),服务(service),话题(topic)。
要理解这些东西大家可以看一下wiki:http://wiki.ros.org/ROS/Tutorials
一条条指令跑一下你就基本懂ROS怎么运行的了!
//2015/5/31 16:40
明天六一儿童节,祝大家节日快乐哈!人有多大快乐就有多大产!!
///上面的中文纯属个人理解,不要太纠结,ROS能用就好!!!GOOD LUCK!! 欢迎大家提出意见!