本次教程的目标是教会大家制作一辆基于ROS机器人系统的小车,在之前我已经发过一个帖子,在原帖的基础上更新过几次。本次的帖子是那个的延续。
接下来我会系统的讲解硬件如何搭建,软件如何去编写,教会大家搭建一个简单的ROS系统的学习平台。
我接下来跟大家讲解:
1.硬件需要什么,怎么连接。
2.小车的软件部分,软件部分我会给大家讲解ROS系统的安装、ROS系统的入门知识、Arduino入门知识、搭建Arduino的ROS开发环境
3.如果小车平台搭建完成后,可以做一些试验,用键盘控制小车,用网页控制小车,在ROS系统内怎么使用OPENCV库等…如果可行我会给大家讲解自主导航。
4.大家有什么需要我讲解的也可以回帖,在我能力范围内我会满足大家的要求哒!
第一节 硬件的搭建
本次设计需要的硬件有Bananapi/树莓派2/… ,Arduino ,电机驱动板、小车底盘一个,移动电源,USB集线器两个。
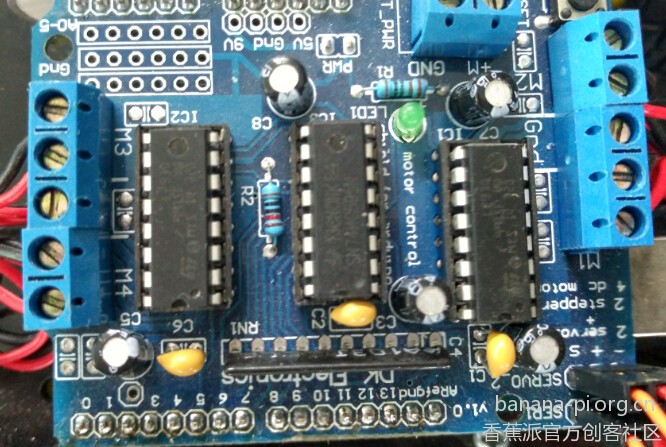
我采用的是香蕉派,系统是lubuntu,Aduino UNO,l293的电机驱动(与arduino配套的驱动板子),4电机底盘,电源选手机用的移动电源就好。要是有其他的锂电池也好!
下面是需要的硬件的图片: 如果大家有支持ubuntu的板子,单片机、或者其他的底盘也可以尝试本次的教程。



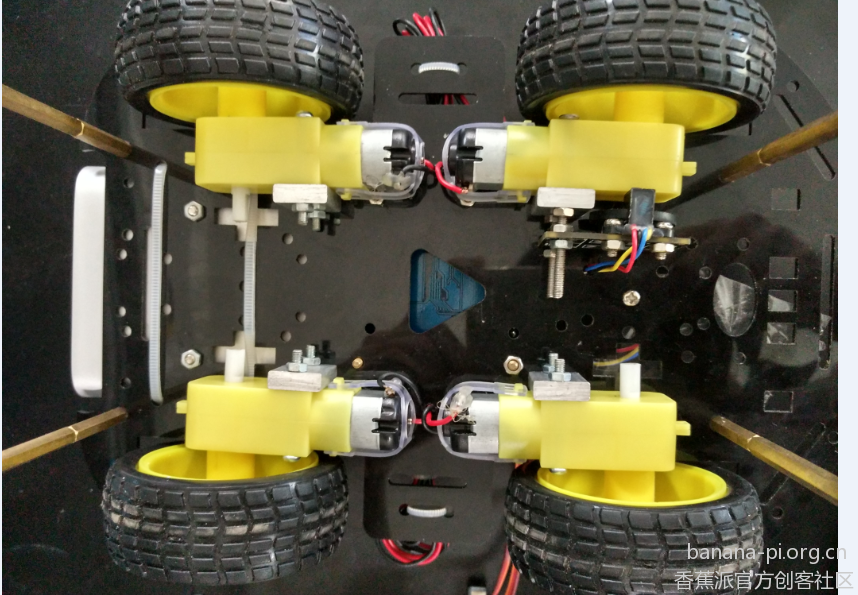
将这些东西固定到小车的底盘上,将电机接到电机驱动板上。arduino和bananapi之间采用usb线连接,在购买arduino的时候一般会赠送这种线。连接完成后的效果图:
